Keyence CCD與 MISBISH ROBOT 整合
紀錄Keyence CCD視覺系統與 MISBISH ROBOT 控制器使用Ethernet(無協議)通訊交握的過程,中間沒有使用PLC控制器。
整體而言設定上簡單容易,只要正確通訊成功並校正好視覺座標以後,就可以使用ROBOT的編程軟體快速的與視覺系統主機做座標與命令的拋接,省略各種判斷與細節上的指令。
1. 連接的第一步,是將CCD視覺系統與 ROBOT控制器架設完成,並且使用RJ45纜線相互連接。接著使用視覺系統的設定軟體,並在開啟的專案中選擇”機械手臂視覺設定”。

2. 根據不同的應用情境,Keyence的軟體已有情處方便的設定選項,在此選擇適合的抓取方式。

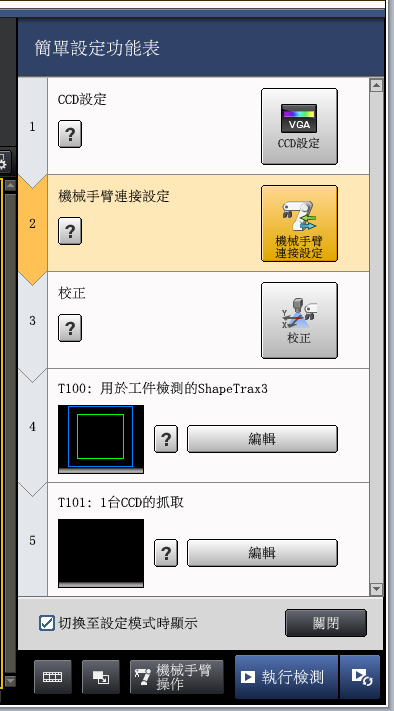
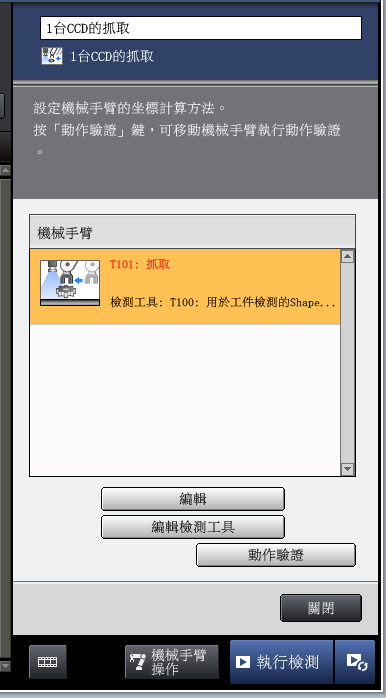
3. 以相機固定的”抓取”模式為例,進入後軟體會提示需要依序進行五個設定來完成。
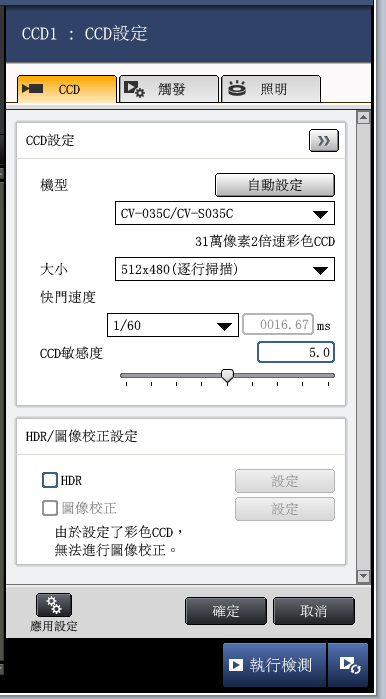
4. 第一個”CCD設定”,主用來設定鏡頭與照明的規格、參數,CCD的部分需要依照選配的鏡頭型號進行設置,觸發信號與照明可依據需求進行設定。
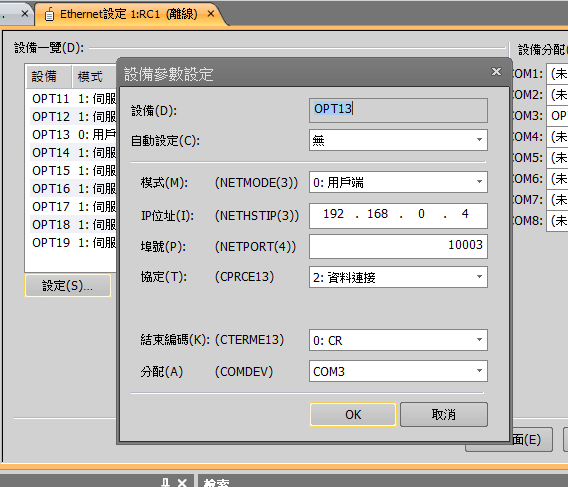
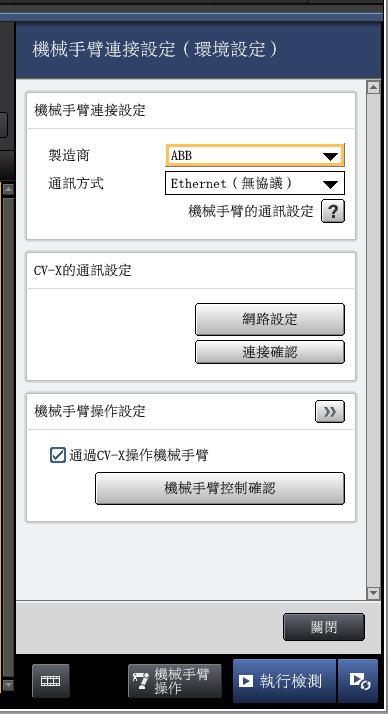
5. 第二個”機械手臂連接設定”部分,需要先將Keyence提供的ROBOT通訊用程式匯入,並且保持程式RUN的狀態。
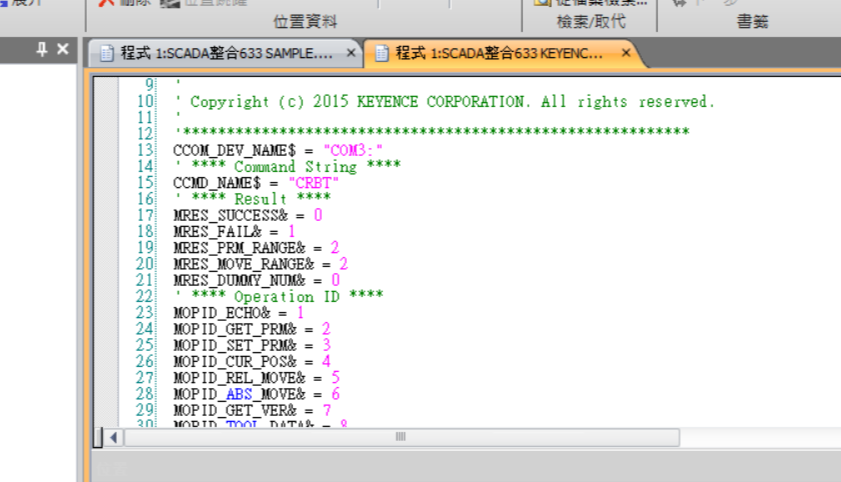
接著從Keyence選定正確的ROBOT製造商以及通訊方式,進行網路連接完成通訊。
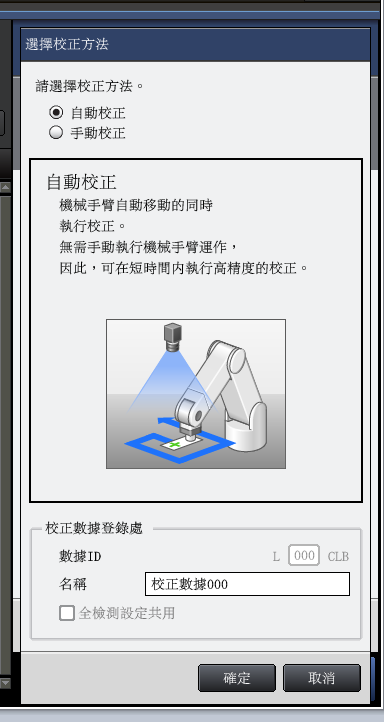
6. 第三個”校正”部分,會使用校工具來使ROBOT座標與視覺系統座標吻合,如此兩者之間就能有共同的距離單位。
7. 最後第四、第五的部分,主要用來登入被抓取物的登錄圖像及動作參數,到這個步驟CCD的設定就完成了!
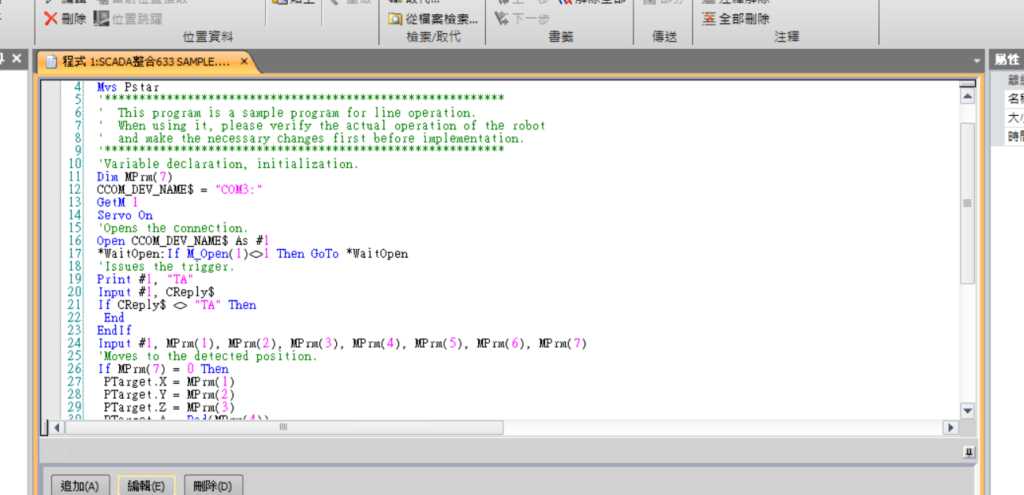
8. 具體整合起來的控制,Keyence 視覺系統與 MISBISH ROBOT控制器,會透過網路通訊將”文件1″輪流讀寫,來進行座標的交換、快門的觸發,如此只要配合上需要的 ROBOT動作指令,就可以無痛完成視覺與手臂的整合囉!