三菱Robot(CR-800控制器)Ethernet通訊設定實例
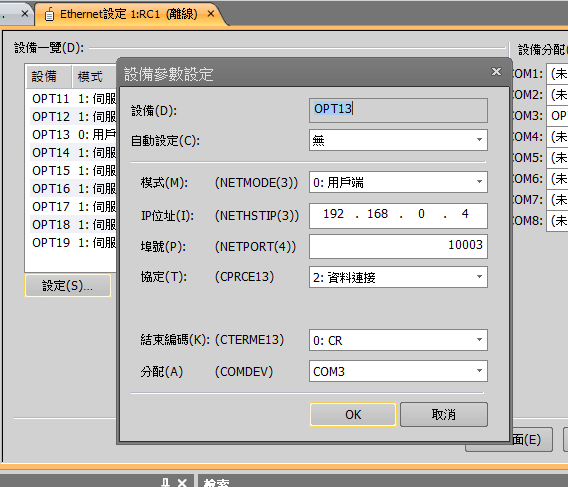
前言 以下內文使用三菱Robot的CR-800控制器,做建立Ethernet通訊設定的示範,使用Ethernet網路通訊可以與PC、或者其他網路設備進行通訊,達到控制或者資料交換的功能。 設定流程 1. 首先進入Ethernet設定頁面 2. 設定Robot控制器網路參數 3. 設定對象設備,以此例設定OPT13位於COM3位置,並且設定通訊參數與協定 4. 使用指…
Ethan 伊森 編寫的工業自動化部落格,紀錄自動化設備、機器人與工業控制的知識平台
Ethan 伊森 編寫的工業自動化部落格,紀錄自動化設備、機器人與工業控制的知識平台
前言 以下內文使用三菱Robot的CR-800控制器,做建立Ethernet通訊設定的示範,使用Ethernet網路通訊可以與PC、或者其他網路設備進行通訊,達到控制或者資料交換的功能。 設定流程 1. 首先進入Ethernet設定頁面 2. 設定Robot控制器網路參數 3. 設定對象設備,以此例設定OPT13位於COM3位置,並且設定通訊參數與協定 4. 使用指…
Keyence CCD與 MISBISH ROBOT 整合 紀錄Keyence CCD視覺系統與 MISBISH ROBOT 控制器使用Ethernet(無協議)通訊交握的過程,中間沒有使用PLC控制器。 整體而言設定上簡單容易,只要正確通訊成功並校正好視覺座標以後,就可以使用ROBOT的編程軟體快速的與視覺系統主機做座標與命令的拋接,省略各種判斷與細節上的指令。 1. …