前言
以下內文使用三菱Robot的CR-800控制器,做建立Ethernet通訊設定的示範,使用Ethernet網路通訊可以與PC、或者其他網路設備進行通訊,達到控制或者資料交換的功能。
設定流程
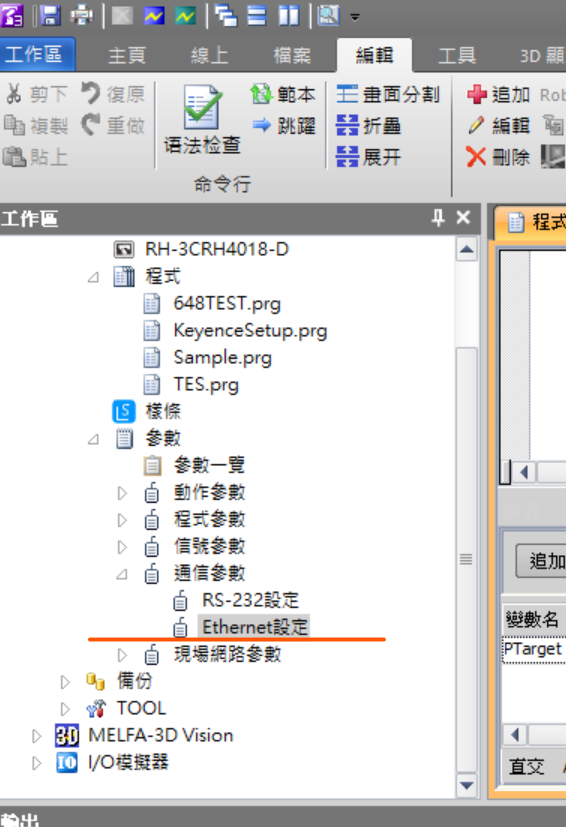
1. 首先進入Ethernet設定頁面
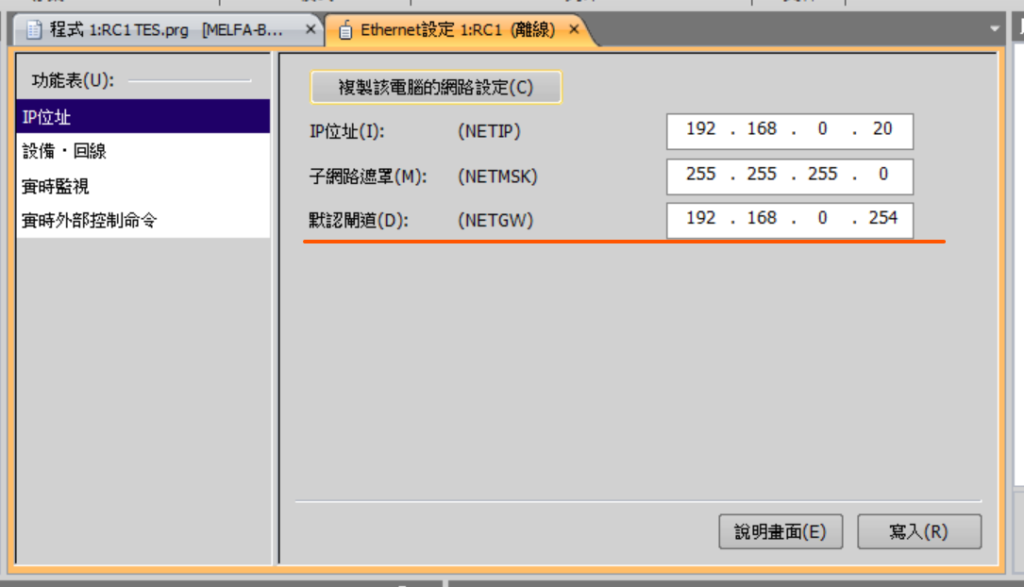
2. 設定Robot控制器網路參數
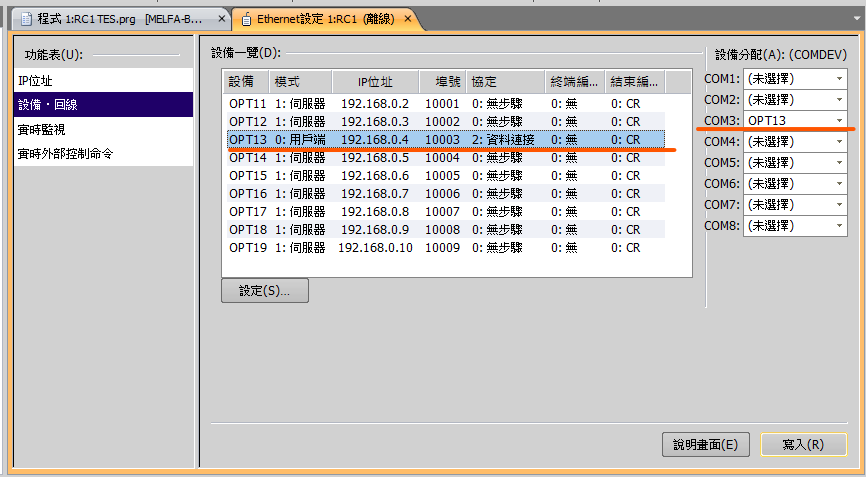
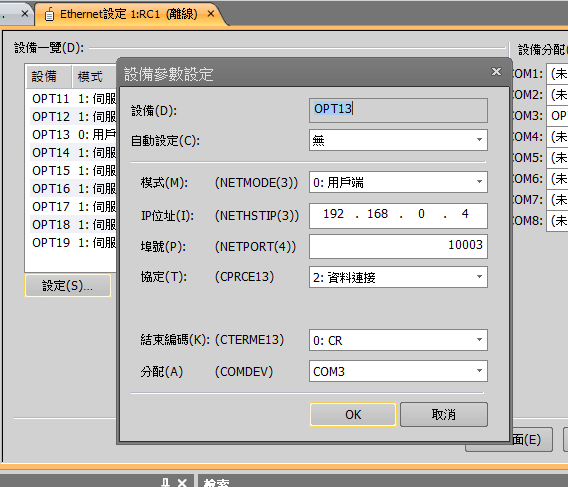
3. 設定對象設備,以此例設定OPT13位於COM3位置,並且設定通訊參數與協定
4. 使用指令進行通訊
幾個重點指令
Open :開啟通訊連接
Print:通訊輸出
Close:關閉通訊並發送
Input :接收通訊
特殊變數
M_Open:通訊狀態
程式碼範例
Open "COM3:" As #1
Dly 0.6
Print #1,"AC,0,1,60,0,0,0,0,0"
Close #1
Dly 0.5
Open "COM3:" As #1
*WaitOpen:If M_Open(1)<>1 Then GoTo *WaitOpen
Input #1, C1$
Close #1
If C1$ <> "NG" Then Print #1,"OKK"
End
End解譯程式碼
Open “COM3:” As #1
開啟”COM3″通訊的"文件1"
Print #1,”AC,0,1,60,0,0,0,0,0″
向"文件1"發送字串 “AC,0,1,60,0,0,0,0,0”
Close #1
關閉"文件1"並且執行”發送”
*WaitOpen:If M_Open(1)<>1 Then GoTo *WaitOpen
等待直到"文件1"被開啟
Input #1, C1$
讀取"文件1"的內容並且寫入字串變數"C1$"
If C1$ <> “NG” Then Print #1,”OKK”
如果"C1$"字串內容是"NG",則發送字串"OKK"