【機器視覺對位】1-視覺成像的物理天花板
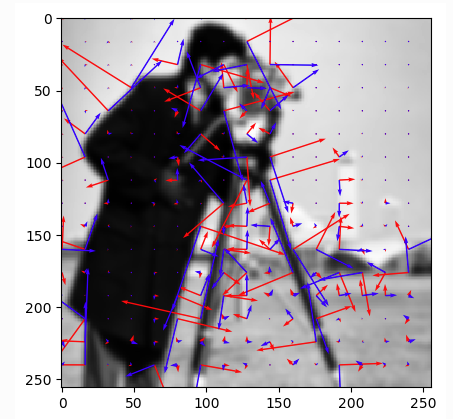
為什麼明明選了高畫素相機,機械手臂的重複定位精度還是不如預期?在機器視覺的世界裡,硬體規格只是門檻,真正的精度取決於你對「物理天花板」與「數學靈魂」的理解。 本文將帶你深度拆解工業視覺系統的核心要素:從相機解析度如何定義手臂移動的「最小刻度」開始,探討為什麼視覺量測必須捨棄一般鏡頭、改採體積龐大的「…
Ethan 伊森 編寫的工業自動化部落格,紀錄自動化設備、機器人與工業控制的知識平台
Ethan 伊森 編寫的工業自動化部落格,紀錄自動化設備、機器人與工業控制的知識平台
為什麼明明選了高畫素相機,機械手臂的重複定位精度還是不如預期?在機器視覺的世界裡,硬體規格只是門檻,真正的精度取決於你對「物理天花板」與「數學靈魂」的理解。 本文將帶你深度拆解工業視覺系統的核心要素:從相機解析度如何定義手臂移動的「最小刻度」開始,探討為什麼視覺量測必須捨棄一般鏡頭、改採體積龐大的「…

在追求極致效率的工業自動化場景中,產品的「標準化」雖是穩定生產的基礎,但現實中料件的物理偏差、散落排序或精密對位的需求,往往是自動化導入的技術瓶頸。本文將剖析「機器視覺定位系統」如何成為機械手臂的雙眼,解決高度標準化難以克服的彈性生產痛點。 這是一個系列文章的開頭,我會分享在執業過程中使用機器視覺定…
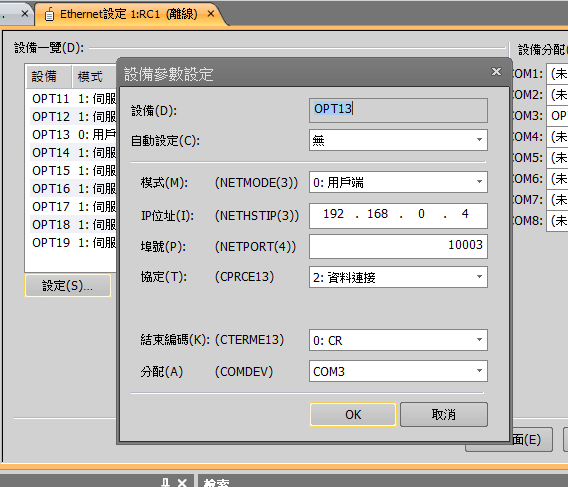
前言 以下內文使用三菱Robot的CR-800控制器,做建立Ethernet通訊設定的示範,使用Ethernet網路通訊可以與PC、或者其他網路設備進行通訊,達到控制或者資料交換的功能。 設定流程 1. 首先進入Ethernet設定頁面 2. 設定Robot控制器網路參數 3. 設定對象設備,以此例設定OPT13位於COM3位置,並且設定通訊參數與協定 4. 使用指…
Keyence CCD與 MISBISH ROBOT 整合 紀錄Keyence CCD視覺系統與 MISBISH ROBOT 控制器使用Ethernet(無協議)通訊交握的過程,中間沒有使用PLC控制器。 整體而言設定上簡單容易,只要正確通訊成功並校正好視覺座標以後,就可以使用ROBOT的編程軟體快速的與視覺系統主機做座標與命令的拋接,省略各種判斷與細節上的指令。 1. …