在追求極致效率的工業自動化場景中,產品的「標準化」雖是穩定生產的基礎,但現實中料件的物理偏差、散落排序或精密對位的需求,往往是自動化導入的技術瓶頸。本文將剖析「機器視覺定位系統」如何成為機械手臂的雙眼,解決高度標準化難以克服的彈性生產痛點。
這是一個系列文章的開頭,我會分享在執業過程中使用機器視覺定位的經驗,讓讀者了解機器視覺將像素座標轉換為實際空間位移的運作邏輯,並且逐步拆解六個影響器視覺定位精度的關鍵。
為什麼「標準化」是自動化生產的基石?
在常見的工業自動化生產線場景中,被生產地的零件大多都是標準化的產品,意思是這些產品有一定程度的品質標準,他們會有公差範圍內限定的尺寸、顏色、材質等等,並且產品本身在設計上,也會考量一定程度在自動化生產上時的優化,因此自動化在設計時,會利用這些產品較穩定的特徵來進行自動化的生產過程,標準化的結果你可以想像成有 100 萬個物理特徵完全相同的撞球,如果進行 100 萬次完全相同的環境力量來撞擊,也會產生 100 萬次極為相似的運動軌跡,自動化在設計的過程就像幫這些運動軌跡加上溝槽、引導、力量控制,這樣就可以達到高品質的重複生產。

霓可
一百萬個撞球都能照著預定軌跡移動,這畫面光是想像就覺得很療癒。不過,如果現實世界真的這麼完美,工程師應該早就失業了吧?我很想知道,要是有一顆撞球稍微長歪了一點,或者不小心掉在奇怪的位置,這些自動化設備是不是就直接罷工給我看了?
ETHAN
所以呀~ 自動化工程師在規劃的時候,除了利用標準規格的特性,也必須盡可能地想到零件可能”長歪”的模式,讓這些長歪零件出現的時候不要太大程度的影響機器生產,理想的的情況下,自動化設備是要可以將這些長歪零件篩選或者剔除的。
當標準化失靈:自動化生產中不可控的「意外」
但在自動化生產的實例仍然有些意外,不會所有的事情都能達到完美的標準化的,例如…散落在輸送帶上或供料機的零件不會總是乖乖地等距排列;或是做到精密取放時,些微的產品特徵差異就會造成組裝上的不良;又或者產品天生就有無法克服的位置偏差,這時候就很適合在自動化的設計加入 機器視覺定位 。

霓可
所以說,當零件開始亂跑的時候,我們就得給機械手臂裝上「眼睛」對吧?我聽說過有一種東西叫機器視覺,它真的能像人類的眼睛一樣,一眼就看出東西歪掉多少嗎?如果連這種不確定性都能克服,那自動化生產線豈不是變得很像有生命的機器人?
ETHAN
嗯…這樣形容也不無道理拉,如果妳說的生命指的是機器不在死板板的只是重複做出動作,加上眼睛的機器人確實就好像讓機器多了一個知覺,於是機器就有了更多能對於真實世界做出判斷的依據對吧?
機械手臂的眼睛:機器視覺定位系統是什麼?
機器視覺定位,是透過工業相機拍攝空間後轉換座標來引導機器手臂工作的系統,就像是機器手臂加上眼睛,這個系統解決了需要高度標準化的問題,透過相機將環境或者產品的偏移空間座標進行補償,機械手臂的移動可以是彈性的路徑;又或者透過相機讓軟體辨識目標的狀態,在讓手臂根據判斷做出不同的動作反應,這樣的好處除了在自動化生產上可以應付產品的不確定性、還一定程度上可以達到彈性生產的目的囉~
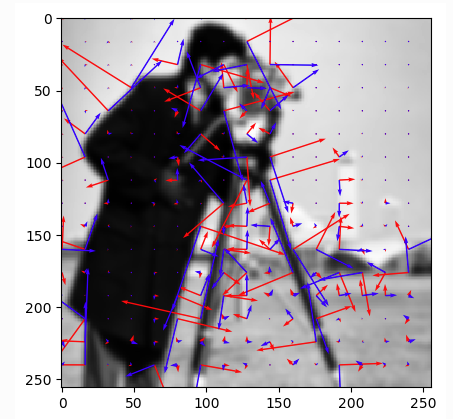
從像素到座標:揭開機器視覺定位的運作原理
機器視覺定位系統的原理,簡單來說就是透過工業相機拍攝後,再將描述空間的像素轉換成機械手臂的座標,你可以想像成工業相機自帶一個比例尺,每次的拍攝就是把這張相片需要的尺寸量測出來變成實際座標 mm,而機械手臂就是接收相機的座標後進行動作。

霓可
把相片裡的像素直接換算成實際的 mm 長度,這種把數位世界和物理世界連起來的感覺真的太帥了。不過我很好奇,如果相機稍微晃到一下,或者燈光突然變暗,這個「比例尺」還會準嗎?這種精細的換算過程,感覺只要一點點誤差就會差之毫釐失之千里。
ETHAN
是的~如果妳把燈關了這些機器視覺確實就慘了,某方面來說…這也像是一種機器視覺需要的”標準化”對吧?
追求精準的代價:高品質視覺系統的 6 大關鍵要素
ETHAN
所以說呀…這個原理聽起來單純,但實際上要讓機械手臂做出精準的動作可不容易,以日系品牌的工業機械手臂來說,重複精度可以達到 ±0.01~0.02mm,要讓機器視覺配合達到這個精度需要多個要素同時達成

霓可
±0.01~0.02mm的精度…這大概比我的頭髮還要細耶~要讓視覺系統配合到這種程度,感覺不是買一台貴的相機就能解決的事情。我得拿筆記本好好記下來,到底還有哪些細節是我們必須搞定的?
我會考慮的 6 大關鍵要素
- 視覺系統的成像能力
- 環境與光源要素
- 鏡頭的架設與機構設計
- 視覺系統的機械手臂的位置校正
- 空間轉換與軟體補償
- 產能時間與經濟成本
結語:好用但不代表通用,成本與效益的權衡
6 個要素會體現機器視覺定位系統的最終品質,在自動化生產線上機器視覺雖然好處多多,但實務上需要考慮架設時的成本,工業用的相機、鏡頭、光源除了比一般消費性產品還要貴上許多,還必須考量到背後看不到的程式編寫、通訊、佈線以及占用的運動空間,也因此,這就是機器視覺定位系統固然好用,但也不會在所有自動化生產線上通通都安裝的原因囉。
霓可
雖然聽完這一切覺得機器視覺定位超強,但看到那個成本跟佈線的複雜度,我終於懂為什麼不是所有工廠都裝滿相機了。看來要設計出最厲害的自動化機器,不只要追求技術頂尖,還得學會怎麼幫老闆省錢。我離目標好像還有一大段路要走,但至少今天我又搞懂了一個關鍵模組。
ETHAN
在接下來的文章,我會更深入的拆解視覺系統的 6 大關鍵要素,講解從物理面的原理和軟體的補償機制,再到實務上的實作經驗時可能會踩到的那些坑,霓可如果有興趣可要好好聽我分享囉!
一般來說,工業機械手臂的動作路徑是寫死的,大部分的時後動作的方式都是依照預先設計的動作點來判斷移動,但加上視覺定位系統後就能透過相機來捕捉正確的夾取座標:
SCARA 機械手臂:預設路徑 vs 視覺反饋
1. 夾持精度: 觀察橘色零件。在模式 B 中,手臂會精準計算位移量,確保夾爪完美對齊零件中心。
2. 視覺補償: 系統模擬工業相機取像後,自動修正 SCARA 旋轉角度,實現 100% 的抓取妥善率。